
About me
I’m a second-year graduate student at the School of Automation, Southeast University. My research interests include computer vision, 3D vision, and embodied AI, with a current focus on 3D hand-object interaction and physics-based grasping.
I am very fortunate to be advised by Prof. Yangang Wang. Before that, I received my bachelor’s degree from the University of Electronic Science and Technology of China (UESTC).
Experience
[2025/06—Present] | Antgroup Lingbo, Research Intern
Reinforcement Learning for General Grasping with Dexterous Robotic Hands
Reinforcement Learning for General Grasping with Dexterous Robotic Hands
[2024/12—2025/05] | Tencent RoboticsX, Research Intern
Data Optimization and Imitation Learning for Fine Manipulation with Dexterous Robotic Hands
Data Optimization and Imitation Learning for Fine Manipulation with Dexterous Robotic Hands
Publications
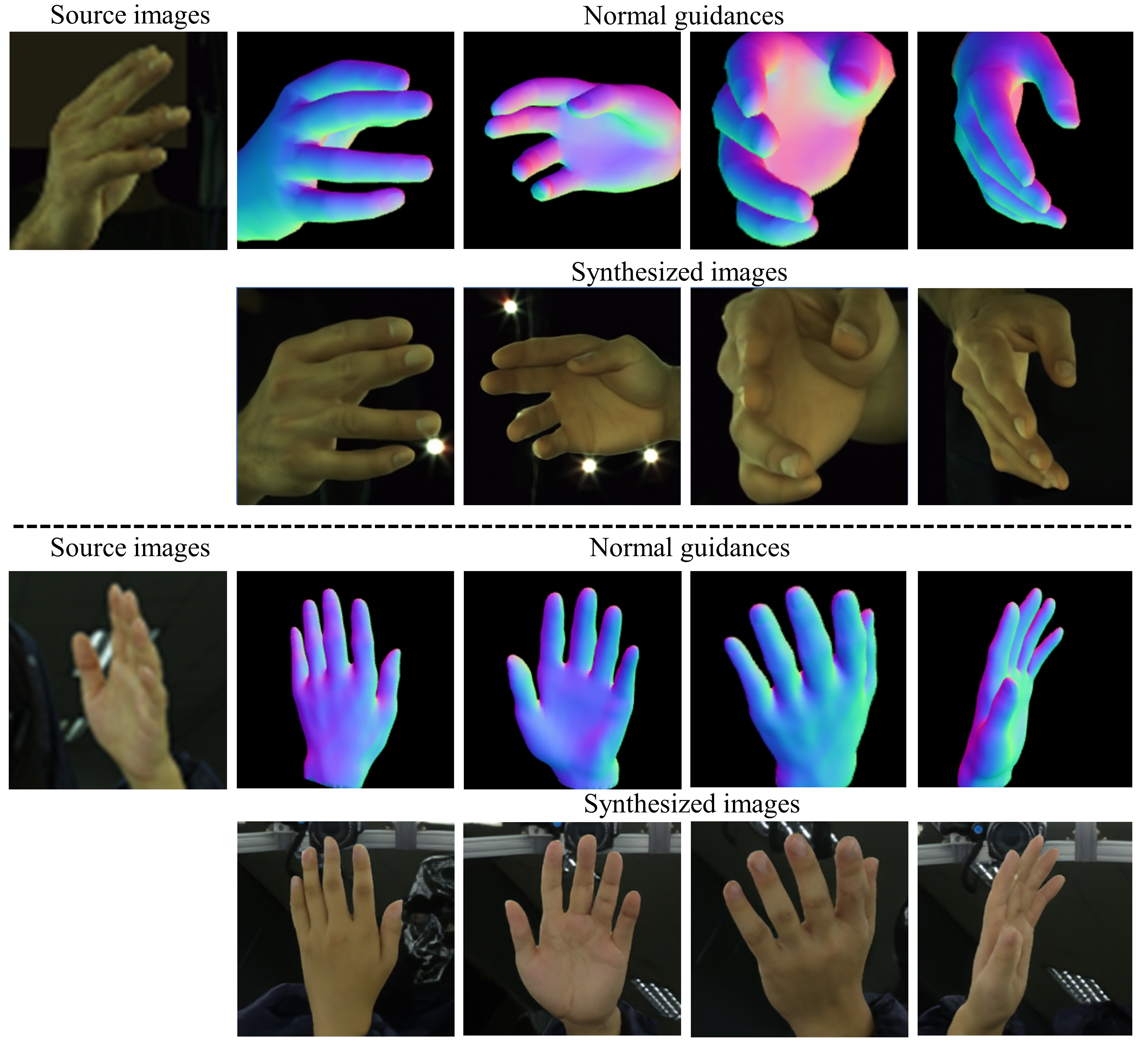
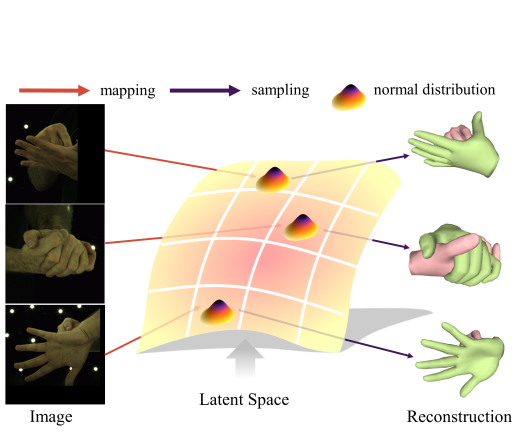
NP-Hand: Novel Perspective Hand Image Synthesis Guided by Normals
Binghui Zuo,Wenqian Sun, Zimeng Zhao, Xiaohan Yuan, Yangang Wang
IEEE Transactions on Image Processing (TIP), 2025
[Paper]
Binghui Zuo,Wenqian Sun, Zimeng Zhao, Xiaohan Yuan, Yangang Wang
IEEE Transactions on Image Processing (TIP), 2025
[Paper]

GraspDiff: Grasping Generation for Hand-Object Interaction With Multimodal Guided Diffusion
Binghui Zuo, Zimeng Zhao, Wenqian Sun, Xiaohan Yuan, Zhipeng Yu and Yangang Wang
IEEE Transactions on Visualization and Computer Graphics (TVCG), 2024
[Paper]
Binghui Zuo, Zimeng Zhao, Wenqian Sun, Xiaohan Yuan, Zhipeng Yu and Yangang Wang
IEEE Transactions on Visualization and Computer Graphics (TVCG), 2024
[Paper]
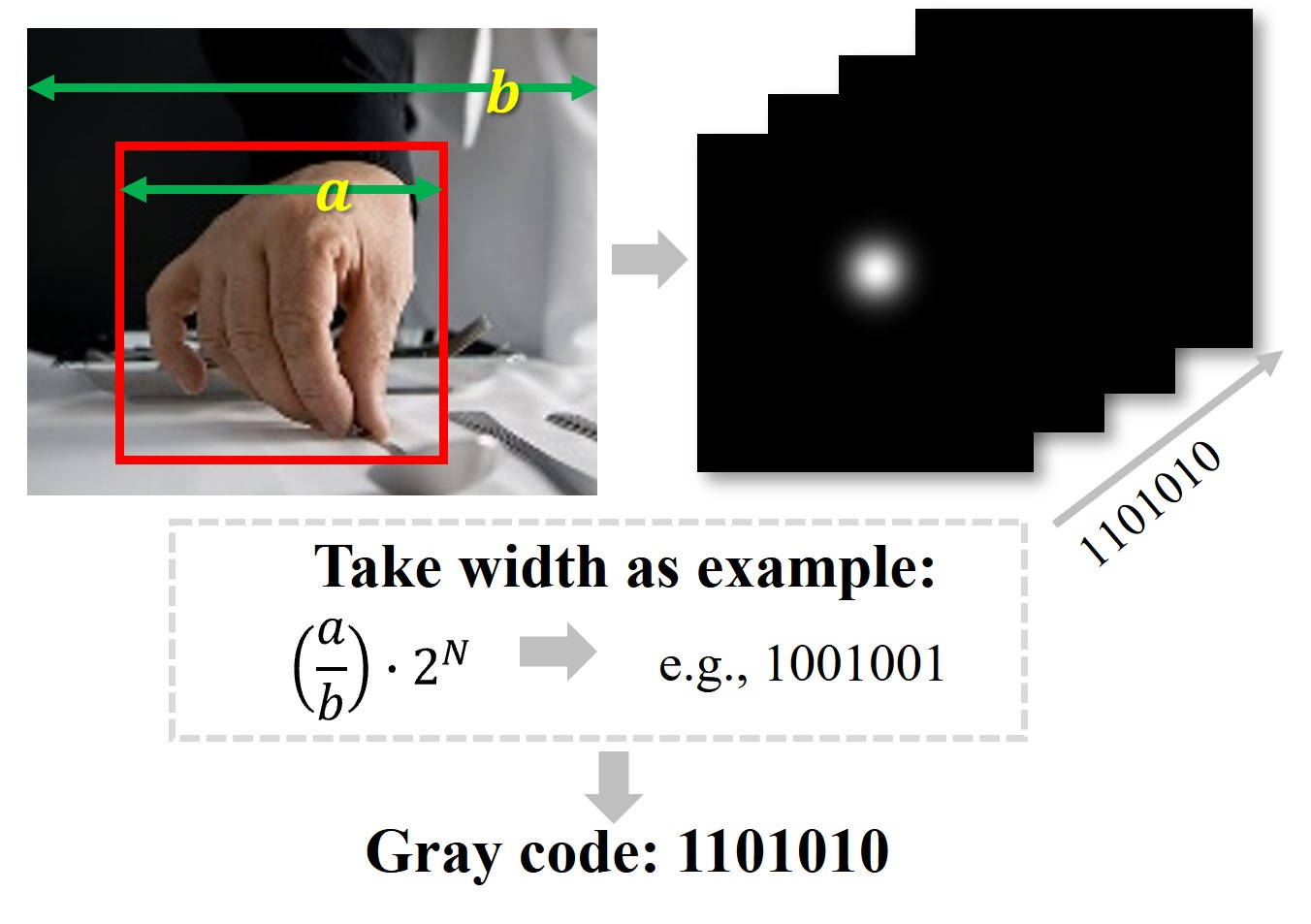
Accurate and Real-time Variant Hand Pose Estimation Based on Gray Code Bounding Box Representation
Yangang Wang, Wenqian Sun, and Ruting Rao
IEEE Sensors Journal, 2024
[Paper]
Yangang Wang, Wenqian Sun, and Ruting Rao
IEEE Sensors Journal, 2024
[Paper]
Reconstructing Interacting Hands with Interaction Prior from Monocular Images
Binghui Zuo, Zimeng Zhao, Wenqian Sun, Wei Xie, Zhou Xue and Yangang Wang
IEEE/CVF International Conference on Computer Vision (ICCV), 2023
[Paper] [Project Page]
Binghui Zuo, Zimeng Zhao, Wenqian Sun, Wei Xie, Zhou Xue and Yangang Wang
IEEE/CVF International Conference on Computer Vision (ICCV), 2023
[Paper] [Project Page]
Projects
Motion Synthesis Framework for Hand-Object Interaction (First-author Under Review)
This project addresses hand-object interaction and proposes a two-stage motion synthesis framework with diffusion for two hands and articulated objects.
[Code]
This project addresses hand-object interaction and proposes a two-stage motion synthesis framework with diffusion for two hands and articulated objects.
[Code]
Task to Atom Action Segmentation
This project focuses on segmenting and decomposing 3D hand-object interaction motion to identify the atom actions, facilitating data processing to further assist in robotic skill learning.
[Code]
This project focuses on segmenting and decomposing 3D hand-object interaction motion to identify the atom actions, facilitating data processing to further assist in robotic skill learning.
[Code]
Dexterous Manipulation Transfer
PyBullet Implementation QuasiSim (ECCV 2024)
This project replicates the ECCV paper QuasiSim. We have implemented the single-hand object grab tracking task in PyBullet and are expanding to two-hand and multi-object tracking, with plans for migration to the Isaac Gym platform.
PyBullet Implementation QuasiSim (ECCV 2024)
This project replicates the ECCV paper QuasiSim. We have implemented the single-hand object grab tracking task in PyBullet and are expanding to two-hand and multi-object tracking, with plans for migration to the Isaac Gym platform.